
Vyemm's Fang
|
[Drops | Comments ]
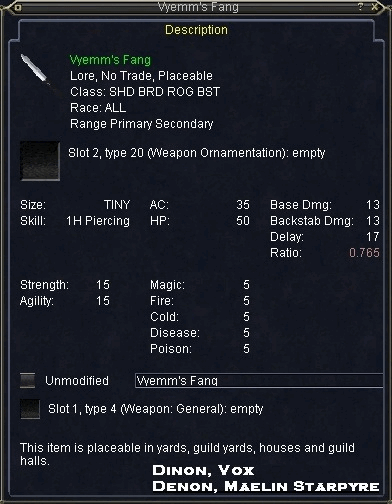
DropsThis item is found on creatures. Temple of Veeshan
|
||||||||||||||||||||||||
  |
|||||||||||||||||||||||||
| Send a correction | |||||||||||||||||||||||||
1 post
Would you use this in Main hand over epic? I just got it last night
1 post
gah, now im being impersonated by you justin? /smack
gaena
gaena
#REDACTED,
Posted: Aug 06 2002 at 5:35 AM, Rating: Sub-Default, (Expand Post) once again monks are screwed by verant. look at it 0 weight. why cant my monky use it? thats BS
29 posts
ooohhhh a urber kitty poke stick!! :-"D
i would love to get this! so sick of using a chill spear. :-"p
i would love to get this! so sick of using a chill spear. :-"p

It's good. For me too **** on.
#REDACTED,
Posted: Aug 20 2001 at 1:40 AM, Rating: Sub-Default, (Expand Post) Im a warrior, and I say, GIVE IT TO THE ROGUE! yeah! then a bunch of cheering and congrating the winner....
#Anonymous,
Posted: Aug 07 2001 at 6:58 AM, Rating: Sub-Default, (Expand Post) OMFG some little B*#ch hasnt whined enough to get this nerfed yet? Like I said before, OMFG. Mrylokar's dagger of blood (12/16, with sweeeeet stats) was nerfed cuz little NEWBS(Scum, trash, garbage, etc, etc(only the ones who complain about high lvl stuff anyways)) whined and complained until VI nerfed it. Grrrrrrrr what is the point of nerfing something as sweet as the Mrylokars dagger of blood? Lets see it drops off Vulak 'Aerr ( lvl 75 ). Does anyone have any clue as to how hard it is to kill this guy? Lets see you have to get through MANY named and un-named lvl 60+ dragons just to get to him. Then you have to beat him. ha good luck considering it took two top guilds to accomplish this amazing feat (FoH and someother good guild) Basically if this weapon gets nerfed I am going to FREAK!!!!!!!!! The mrylokars thing is a little off topic, but is befitting considering this is the next best thing and that it drops from a lvl 75 mob. You newbs who get things nerfed, cuz you cant have it and you never will, should have your comps smashed to pieces in front of you. Keep it real all and have fun (except you crybabies) CYA =)
Anonymous
Fawk it as a weapon... READ: RANGE SLOT
#REDACTED,
Posted: Aug 17 2001 at 11:42 PM, Rating: Sub-Default, (Expand Post) lmao are you an idiot or just sarcastic this item would be wasted in range unless you have no skill in piercing
#REDACTED,
Posted: Jul 21 2001 at 11:17 AM, Rating: Sub-Default, (Expand Post) Oh well another disapointment for us Rangers, I will learn to live with it or quit this game, getting boring anyway. I am waiting for verant to nerf it like they do other uber drops.
Believe me, Lord Vyemm drops some very nice stuff that rangers (and every other class) can use too.
#Anonymous,
Posted: Jul 21 2001 at 1:55 AM, Rating: Sub-Default, (Expand Post) WHO EVER THE HELL IS BAMING
45 posts
Verant is beginning to find a way to get weapons to high level charecters without having the unbalance of getting them to lower charecters other than 60. I am really anticipating what VI's next move is to keep the level 60 in the game. Since leveling isn't an issue anymore, their only reason to play is loot, guild, and friends. Leveling is about 50% of the game for most people if not more for some. The numbers really don't move much when you take the 50% away. That leaves a big gap that needs to be filled. Players will maybe start another charecter if they haven't done so by 60, but even that novelty will get old as well. I REALLY hope they come up with something more origional than these 18dam 10dly weapons with 100 all stats and saves. They are running out of rope to throw in my opinon. When your a 60 melee, you really dont care how much damage your doing to a 250k mob, its just kind of irrelivent.
thats cause your a warrior...and everyone knows a warrior is there to TANK not DPS, i guarantee any respectable rogue will be pushing at least 30dps more than any respectable warrior, dont believe me ask a rogue with 30% modifier to Backstab and tell me xtra dps dont mean chit
Anonymous
excellent rogue piercer great stats the damage/delay rocks and the 35 ac is a nice bonus its also a super sweet range item as well
#REDACTED,
Posted: Jul 20 2001 at 6:23 AM, Rating: Sub-Default, (Expand Post) I don't like this....again there is an awesome weapon wich an SK can use and an pally can't =(
This won't ever go to an SK anyway..and I don't see why you would care, considering that for a paladin doing ntov this weapon SUX, instead of a 13/17 weaps you and SK's get weapons with higher dmg than dly and they still have a bunch of AC and stats on them.
There are also more Paladin only weapons/armor pieces available, too.
I'd take a paladin in full DW than a SK in full darkforge (closest level equivelant i can think of)
I'd take a paladin in full DW than a SK in full darkforge (closest level equivelant i can think of)
27 posts
Oooh just because pallies didnt get this one you have to whine.
First of all you cant use 1hp and I am sure there are weapons out there that are better than this that pallies can use.
First of all you cant use 1hp and I am sure there are weapons out there that are better than this that pallies can use.
#REDACTED,
Posted: Jul 20 2001 at 10:59 AM, Rating: Sub-Default, (Expand Post) I agree, Paladins should be able to summon pets, to Harm Touch as well as lay hands. Then again, Paladins should be able to Teleport, Bind, Translocate and nuke. Also they should have access to all ranges of weapons and armor in the game, as well as Int Casters Robes... Man, I think Paladins are way too weak.
#REDACTED,
Posted: Jul 20 2001 at 10:03 AM, Rating: Sub-Default, (Expand Post) Paladins can't use 1h peircing. SK's can, get over it.
Dood, u know dis ain't true...Pallies can use a few dinky 1h piercers (such as the Harpoon of the Depths).
I rather fancy a nice shiny sword over a piercer for a holy warrior anyways...not like the different weapon types have significant advantages/disadvantages in EQ for each class. Leave the light piercers to dem shady characters. ^_^
Khemosaabe "SPAM" Longbow
Lvl 51 Ranger and Slayer-of-Bunny-Wabbits
"Uh oh, CHONGO!!"
I rather fancy a nice shiny sword over a piercer for a holy warrior anyways...not like the different weapon types have significant advantages/disadvantages in EQ for each class. Leave the light piercers to dem shady characters. ^_^
Khemosaabe "SPAM" Longbow
Lvl 51 Ranger and Slayer-of-Bunny-Wabbits
"Uh oh, CHONGO!!"
25 posts
Uh, actually, that was a mistake. Clerics were listed on the harpoon of the depths. Verant was kinda confused on that item ;-)
#REDACTED,
Posted: Jul 20 2001 at 4:53 AM, Rating: Sub-Default, (Expand Post) When I get this baby for my rogue(while playing him, dumbasses), it's permanent offhand!
1 post
It says range as well... there are alot of good stuff out there, but something in range that gives these kinda stats or ac is really awsome if im reading this right.
1 post
I bet people are going to complain about this one to, and it will get nerfed to 10/18 or some crud.
LOL, that's the first thing that came to my mind when I saw this item. Maybe this item is an attempt by VI to make up for their nerfing of the Dagger of Blood? Just a thought
What, Verant attempt to FIX their mistakes? LOL!! I'll be waiting for that day to come and if it ever does, the beer is on me! ;)
Anonymous
I bet this is dropped by VYEMM!!
#REDACTED,
Posted: Jun 02 2002 at 12:54 AM, Rating: Sub-Default, (Expand Post) Why would Vyemm drop his own fang ? hmm...sounds a bit screwy to me....Maybe his momma drops it...
Uh, wouldn't it be in his mouth, otherwise? It IS supposed to be his Fang, right?
34 posts
This might be the best piercer I've ever seen. 35ac on a weapon is out-frickin-standing.
17 posts
A lot better than an Idol of the Thorned :P
Giving this to a Bard or Shadowknight would make your Rogue cry. (Of course, it will make the Bard/SK smile but hey.)
Aww.... poor Rogue.
It's not like there aren't just as good of weapons (damage/delay wise) available for Rogues.
The SKs and Bards need the AC more.
It's not like there aren't just as good of weapons (damage/delay wise) available for Rogues.
The SKs and Bards need the AC more.
actually in velious content, i do believe this is the best rogue piercer available, granted im sure VT has some and i know ther are lots in PoP. But hey, we talkin velious here, its the shizznizzil
#REDACTED,
Posted: Sep 01 2001 at 6:22 PM, Rating: Sub-Default, (Expand Post) OMG, I agree TOTALLY stupid. Lets just ignore that fact that rogues have WAY less HP then either SK or BARDs. BUT bards and SK's are PLATE classes while rogues are only chain. That means SK's and BARDs already have ton's of AC compared to rogues. Rogues need every bit of AC they can get they're hands on. Especially since verant's idea of making a game more challenging is to merelly mob that has more HP and deal a TON more damage. Don't get me wrong, rogues have their strengths too, this not just a "Why does my <insert class name here> always get screwed" post. Sigh '/rant off' people that don't understand need-before-greed really get my goat.
I believe the point is that Bards and SK's attract more attention (aggro), well, DELIBERATELY, attract aggro more than a Rogue would, or would want to do. Bards and SK's are usually MA's and SA's, while Rogues, like Rangers (scout-classes) are more the DPS Gods, B!+C#-slapping the MoBs down. Not to say that they're the only ones that can use the AC, just that those particular classes, as opposed to the other two listed, are more designed to be on the aggro intentionally, and concentrate more on the fact that the weapon gives AC, than on its ratio, although you must admit, that ratio does kick @$$!
Lol Stoopid, everyone needs AC... Every little bit of health you can save with 35 more AC can make the difference between life and death. Who are you to say a rogue dont need this as much as anyone else? LOL!
Mortiss Coldhearted lvl 45 Necromancer
Mortiss Coldhearted lvl 45 Necromancer
Please see my freply to pith.
#REDACTED,
Posted: Jul 19 2001 at 4:18 PM, Rating: Sub-Default, (Expand Post) Just like them, No warrior, this would be AWESOME for them
#REDACTED,
Posted: Jul 19 2001 at 9:25 AM, Rating: Sub-Default, (Expand Post) Are you kidding? There are virtually no good weapons warriors can't use. I commend verant on putting in a weapon that not only can bards & rogues use, but they don't have to fight a warrior for.
Free account required to post
You must log in or create an account to post messages.© 2024 Fanbyte LLC