

its still good for a twink leveling / aa grinding. gotta dw them tho w/augment procs
but the darkened or whatever higher level version is sick too, same concept but matched to level.

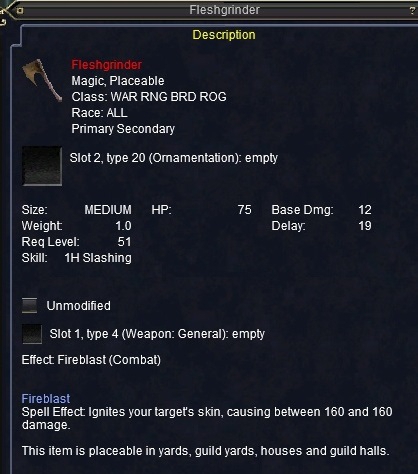
Fleshgrinder
|
[Drops | Comments ]
DropsThis item is found on creatures. Cazic-Thule 2.0
|
|||||||||||||||||||||||||||
   |
||||||||||||||||||||||||||||
| Send a correction | ||||||||||||||||||||||||||||
but gonne farm it anyway for my war hes gonne solo naggy! and vox ofcourse
3 posts
I am considering buying this weapon for my ogre warrior and I was wondering if anyone would happen to have a pic of the graphic for this weapon. Thanks.
Gutzmek Wazzdakka
Ogre Warrior of the 53rd Season
Tunare
Gutzmek Wazzdakka
Ogre Warrior of the 53rd Season
Tunare
25 posts
Graphic looks pretty much like a triangular stone lashed to a handle, kinda unspectacular really.

what is location of 4c plz
2 posts
which do u think would be better. using two of these? or one of these and a copper hammer of striking?
well if your high enough for the VHS to proc, CHS ins better ( 179dmg DD proc higher dmg on the weapon, and stats) and if your high enough to use the CHS, then you should have 1hb maxed along with 1hs...and tot eh the palie stealin agro.. when you root a mob, aggro goes tot he closest person, so no point in tuanting, and when you stun, you reset the aggro list, so again the 1st tuant off after the stun will get the agro, and if you are stealing agro, then you need to be clobbered upside the head, there is no I in team, so learn how to play and stop trying to be a 1 man band, every class has its purpose.
OK a)theres a me in team and b)Did you just say when you stun, you reset the aggro list?? KNow a class before you talk about it.
...huh?
I have a warrior and thought 2 would be better than one, and i was right...
Drop some of your strength and replace it with dexterity, you can easily keep aggro with 2 of these, and chances are you will do more damage from the procs than you will lose from dropping your strength, having a shaman in the group just makes it silly, in one easy test fight with 2 of these, with a dexterity of 230 (thank mr shaman) i got 23 procs off (3680 dmg) thats pretty awesome DPS may not seem much in the long run seeing as though most casters can do that in a few casts, but still any warriors with 2 of these will be a great warrior..
Drop some of your strength and replace it with dexterity, you can easily keep aggro with 2 of these, and chances are you will do more damage from the procs than you will lose from dropping your strength, having a shaman in the group just makes it silly, in one easy test fight with 2 of these, with a dexterity of 230 (thank mr shaman) i got 23 procs off (3680 dmg) thats pretty awesome DPS may not seem much in the long run seeing as though most casters can do that in a few casts, but still any warriors with 2 of these will be a great warrior..
Future Wizard of The Combine
I saw many of the posts, and to be true, this beauty is an aggro machine! With this in primary and Snowchipper in sec I could even out taunt lifetaping SK's! I advice this to any1 who can buy it!
#REDACTED,
Posted: Sep 03 2004 at 5:51 PM, Rating: Sub-Default, (Expand Post) WOW nice fake bard how long did it take you to make him up?
Lot of great info, along with the my class is better than your class. Got fleshgrinder, altho haven't used yet (hunting in Skyfire), and have gotten wavecrasher to go with it. From the wavecrasher posts, it seemed like a nice taunt weapon with the 20% slow and 180 DOT pissing off the mob. I also like the fact that even without the perfect world (shaman or enchanter) you might slow the mob down a little, or enough to be successful. But then again, I am only a level 55 warrior still learning the class. Best to all of you on whatever combo you choose, because a lot of times, everybody is right.
#REDACTED,
Posted: May 15 2003 at 3:09 PM, Rating: Sub-Default, (Expand Post) uh soulreaverl if you steal aggro from mobs alot, you must play with some suck warriors. ive never had the aggro stolen...except on the occasions a wizzy does a crit blast, or some guy over nukes. So dont say you can out aggro a warr any day, bc apparently you dont play on my server.
15 posts
Actually, Rulgrok, hybrids like Paladins and SK's are the best aggro holders. Not the best tanks, but we can out aggro anybody, any day, anywhere. Normal melee dmg + stuns (pally) or root/manasieve stun (thunder of karana) REALLY **** off the mobs so they aggro us. I know because I have personnally out aggroed warriors 6-7 levels higher than me (I'm a 51 pally). I know SK's can do just as well, because they have a series of spells that increase hate by a certain %. Combine that with lifetaps, dots, etc.. you have an aggro machine. So dont go knockin on something you don't know anything about.
26 posts
Anyday? Any time? Ever grouped with a warrior with one of these https://everquest.allakhazam.com/db/item.html?item=6447 ?
But seriously, if your goal is to out agro a warrior then I would hate to be in your group. The warrior's natural ability to stand in a fight longer than any other melee is our stregnth. Our ability to use EVADE at level 52 has saved many groups I have been in when the healers are OOM.
Any finger wiggler can out agro you and any warrior can out tank you.
Also, a warrior taunting continuously and using two fast procing weapons I think can hold agro pretty good even with a pally in the group. It still amazes me when I see warriors using wurmslayers and centi-longswords. For tanking, I use a Snowshipper (10/20 with 120 point proc) and a Lamentation in my secondary slot that is a 9/19 weapon. During fights I constantly kit taunt when the key resets itself and slam that can stun mob. The mob may turn once or twice during the fight but I can get the agro back.
But seriously, if your goal is to out agro a warrior then I would hate to be in your group. The warrior's natural ability to stand in a fight longer than any other melee is our stregnth. Our ability to use EVADE at level 52 has saved many groups I have been in when the healers are OOM.
Any finger wiggler can out agro you and any warrior can out tank you.
Also, a warrior taunting continuously and using two fast procing weapons I think can hold agro pretty good even with a pally in the group. It still amazes me when I see warriors using wurmslayers and centi-longswords. For tanking, I use a Snowshipper (10/20 with 120 point proc) and a Lamentation in my secondary slot that is a 9/19 weapon. During fights I constantly kit taunt when the key resets itself and slam that can stun mob. The mob may turn once or twice during the fight but I can get the agro back.
Scholar
46 posts
Voice
Terror
Clinging Darkness
Terror of Thule I just threw in there to show you that the effect on blade of carnage really isn't that great. I mean, it is for a warrior...every bit helps, but it holds no argument in saying that sword will help you out taunt an sk.
As for "any finger wiggler can out agro you." The only class that's going to outtaunt an SK chain casting darkness is another sk or a necro chain casting darkness; and that includes wizards chain nuking. That's why when you absolutely positively don't want the cone AE mob facing your casters, you put your SK on the other side. = )
I'm not putting warriors down...warriors will do more weapon damage, stay alive longer, disc better, AE taunt, and yes, tank better. (Equally equipped and AA'd of course). But you're deluding yourself to think that a warrior can even come close to the taunting power of a shadowknight.
(Coincidentally, using clinging darkness to taunt a mob works whether it is immune to snare or not)
Edited, Fri Jul 25 02:55:36 2003
Terror
Clinging Darkness
Terror of Thule I just threw in there to show you that the effect on blade of carnage really isn't that great. I mean, it is for a warrior...every bit helps, but it holds no argument in saying that sword will help you out taunt an sk.
As for "any finger wiggler can out agro you." The only class that's going to outtaunt an SK chain casting darkness is another sk or a necro chain casting darkness; and that includes wizards chain nuking. That's why when you absolutely positively don't want the cone AE mob facing your casters, you put your SK on the other side. = )
I'm not putting warriors down...warriors will do more weapon damage, stay alive longer, disc better, AE taunt, and yes, tank better. (Equally equipped and AA'd of course). But you're deluding yourself to think that a warrior can even come close to the taunting power of a shadowknight.
(Coincidentally, using clinging darkness to taunt a mob works whether it is immune to snare or not)
Edited, Fri Jul 25 02:55:36 2003
3 posts
I am a 59 warrior, and although my gear isn't very good, every +55 warrior has (or should have) a Greatstaff of Thunder. With this weapon and either boon or shaman dex buff (you will have one of the two every group you are in at this level) the weapon will proc a lot, the effect is a 1.2 second stun, or so I have heard. Even with a slow delay of 30, I have taken turns tanking with paladins and SKs and so far I haven't had to make the embarrassing admission that a lowly hybrid can tank or hold agro better than I can.
Also a 57 Warior wielding Greatstaff of Thunder, and you're sadly mistaken. SK's and Pallies, can ALWAYS take the aggro from us man. They just DON'T when the situation isn't right for them to since it's better for the group as a whole. You're happy with you're stun from the Greatstaff, (hell, i'm extatic for it) but the pally has 4 of those all in a nice little row that he can cast at will, he just doesn't while you're meant to hodl the aggro. Trust me, a cleric mises a CHeal and you go down, that Pally / SK's gonna have aggro locked before you even pop at your bind.
#REDACTED,
Posted: May 14 2003 at 11:35 PM, Rating: Sub-Default, (Expand Post) randers arb t fragial like one person said i got a lvl 65 ranger and wiht my bow i shoot fast and hard so of course when i have SoV on i am shooting arrows for 500+ non-stop SO when i get aggro they run twords me root em don t shoot let warrior/MT get aggro and start shooting like crazy again and keep doing that till mob is dead have a nice day=)
I hate to break it to you but as an SK I can hold agro alot more than a warrior in fact I usually steal the agro without taunting. I think warrior should always be the main tanks, but I can out agro an warrior anyday.
I just bought my second Fleshgrinder this weekend on Fennin Ro. I worked my way through level 58 this week in Plane of Disease so i had plenty of time to experiment with different combos. Like the earlier post, i had a Disembowler and a fleshgrinder at one point. While i did notice a drop in damage output (went from hitting for 70's to 60's) (always with max str) i noticed a huge increase in aggro. While a proc such as Frostbite on a frostbringer grabs the mobs attention faster then a grinder, it doesnt maintain it like the fleshgrinder does. Ive used both a fleshgrinder and frostbringer in primary and i can say that with 255 dex each time, the grinder procs a bit more than the frostbringer. Additionally, while it is true that the offhand weapon procs less often, i went from proccing on avg. 8 time a fight to a whopping 14 to 16 with 2 grinders (with 255 dex in both cases). Thats an additional 2240 to 2560 damage on top of my regular melee output which is quite high given the ratio of the fleshgrinders. Another thing to consider is resists. While the proc (fire based) is resisted every once in a while, when you are hunting in PoP against mobs that are avg level 55 (tier one mobs), your group will most likely have a slower (sham/enc) and they will be debuffing or tashing the mob anyway so 95% of the procs will hit. Prior to PoP, mobs in karnors castle or kael drakkal or whever you may be hunting simply do not have high resists due to the fact that they are are either cold based or level 50ish mobs.
Another thing that should be addressed in this post is all the warrior vs ranger crap. personally, i believe that pre PoP rangers were a fine main tank. now however, with the release of PoP, it has become very difficult for any class BUT a warrior to main tank in a group setting. This isnt because rangers are an inferior class, but rather due to the way VI has engineered the character classes. If a ranger had the hp/ac of a warrior, he wouldnt be a ranger, he'd be a warrior. Rangers werent programmed to have the kind of hps that warriors do and therefore cant handle the sort of damage that the PoP mobs dish out. On the other hand, i'd like to see a warrior shoot a mob with a bow for 1k+ damage. The classes are different and therefore have their own strengths and weaknesses (warriors included: lets see a warrior solo PoV/PoS/PoN etc)
Lastly, when it comes down to who should use the grinder, it reall doesnt matter. yes it generates aggro, but any good warrior will be able to maintain taunt over the mob no matter what his group does to it. 160 dmg from a proc is nothing compared to a sunstrike crit froma wizard. Just TAUNT.
Suurge Drackenfyre
59 warrior of Fennin Ro
Another thing that should be addressed in this post is all the warrior vs ranger crap. personally, i believe that pre PoP rangers were a fine main tank. now however, with the release of PoP, it has become very difficult for any class BUT a warrior to main tank in a group setting. This isnt because rangers are an inferior class, but rather due to the way VI has engineered the character classes. If a ranger had the hp/ac of a warrior, he wouldnt be a ranger, he'd be a warrior. Rangers werent programmed to have the kind of hps that warriors do and therefore cant handle the sort of damage that the PoP mobs dish out. On the other hand, i'd like to see a warrior shoot a mob with a bow for 1k+ damage. The classes are different and therefore have their own strengths and weaknesses (warriors included: lets see a warrior solo PoV/PoS/PoN etc)
Lastly, when it comes down to who should use the grinder, it reall doesnt matter. yes it generates aggro, but any good warrior will be able to maintain taunt over the mob no matter what his group does to it. 160 dmg from a proc is nothing compared to a sunstrike crit froma wizard. Just TAUNT.
Suurge Drackenfyre
59 warrior of Fennin Ro
20 posts
"but any good warrior will be able to maintain taunt over the mob no matter what his group does to it. 160 dmg from a proc is nothing compared to a sunstrike crit froma wizard. Just TAUNT."
I'm sorry, I have to disagree with you here. Yes it is the warrior's job to taunt and get hit, but it is the rest of the groups responsibility to *let* the warrior maintain aggro. Remember, just about everyone and their grandmother's kitten can out-taunt the warrior, but just because you CAN doesn't mean you SHOULD.
I'm sorry, I have to disagree with you here. Yes it is the warrior's job to taunt and get hit, but it is the rest of the groups responsibility to *let* the warrior maintain aggro. Remember, just about everyone and their grandmother's kitten can out-taunt the warrior, but just because you CAN doesn't mean you SHOULD.
4 posts
For using a primary weapon would a FG be better or the Disemboweler? I've been pondering this for a long time. Disemboweler's are cheaper than a FG, but it does not have the proc. I've seen warriors and rangers say that they would prefer to go with a FG, but then from some I see them say it hardly ever procs. I know the +3 magic damage on the Disemboweler would be rarely calculated in on some of the higher end mobs. But is the FG's proc ever resisted?
Oriona Gladerunner
Warder
Edited, Thu Mar 6 11:29:40 2003
Oriona Gladerunner
Warder
Edited, Thu Mar 6 11:29:40 2003
9 posts
I have been using my two Fleshgrinders for two and a half months now, and I have no complaints at all. I proc between 6-8 times per mob, Darkblue or higher. I paid 65k and 75k for the weapons back in Oct and Nov. On my Ogre War.
Edited, Sat Feb 1 13:47:49 2003
Edited, Sat Feb 1 13:47:49 2003
Grimblades Reaver <Vis Maior> EQ1
"http://www.magelo.com/eq_view_profile.html?num=2740"
Darkling of Everfrost EQ2
"http://www.magelo.com/eq_view_profile.html?num=2740"
Darkling of Everfrost EQ2
#REDACTED,
Posted: Jan 31 2003 at 3:03 AM, Rating: Sub-Default, (Expand Post) Obviously a bard weapon
18 posts
I'm sorry, I think I went to the wrong mssg board. Where's the info on the Fleshgrinder? This is apparently a Ranger vs Warrior thread.
/sarcasm off
/rant on
Seriously, if I wanted to know the merits and weakenesses of different classes, I'd go to the class forums and read up on them. So much useless crap gets posted here (90% of it by people with no clue or tunnel vision). Please just post relavent info relating to this ITEM (where it drops, off what mob, gear needed, tactics, ect...) and leave the other crap for another forum. I could care less who you think should or shouldn't use it b/c you're not in my group and aren't going to make the decision who gets it anyways.
/rant off
Baroness Prytty Heartsmiter
Level 61 Warlady of The Arisen and Damn Sexy Troll
Terris-Thule Server
/sarcasm off
/rant on
Seriously, if I wanted to know the merits and weakenesses of different classes, I'd go to the class forums and read up on them. So much useless crap gets posted here (90% of it by people with no clue or tunnel vision). Please just post relavent info relating to this ITEM (where it drops, off what mob, gear needed, tactics, ect...) and leave the other crap for another forum. I could care less who you think should or shouldn't use it b/c you're not in my group and aren't going to make the decision who gets it anyways.
/rant off
Baroness Prytty Heartsmiter
Level 61 Warlady of The Arisen and Damn Sexy Troll
Terris-Thule Server
1 post
Um.. I am a 60 warlord. I would rather spank my monkey then argue over who is better a ranger or a Warrior.
Its as simple as this..
Warriors with alot of AA like myself suck damage up
Rangers do other stuff
Its as simple as this..
Warriors with alot of AA like myself suck damage up
Rangers do other stuff
2 posts
the only way you're really going to add more damage to a fg/fb combo would be to get another fg (anything else is going to be sacrificing aggro or much more expensive), upgrade haste item, or buy an attack buff item such as gobby earring or turtle belt. at 190 str you might want to add more there also unless you group with a shammy a lot. since you say you have no trouble holding aggro i'd recommend upgrading to cultural or ss armor first
Scholar
16 posts
I just picked up this weapon in the bazaar today (paid 60k btw) and am duel wielding it in my secondary slot with willsapper in my primary. I have found that I have a lot of difficulty getting this weapon to proc.
I know that offhand weapons proc less often than primarys but the proc rate is ridiculously low. My dex after the shammy buffs is over 230. I find that the willsapper procs about 6-8 times a fight, while the grinder MIGHT proc 1 fight in 10. While i was prmarily useing a JBoW before obtaining the grinder, I would often play around with other proc effects in the offhand. One of my favorites was SWoE, i found that this wepon, althgough with a much lower delay and less chances, would stil proc an average of one time a fight even in the offhand. Does anyone have similar results to this? Is it a slow procer?
I know that offhand weapons proc less often than primarys but the proc rate is ridiculously low. My dex after the shammy buffs is over 230. I find that the willsapper procs about 6-8 times a fight, while the grinder MIGHT proc 1 fight in 10. While i was prmarily useing a JBoW before obtaining the grinder, I would often play around with other proc effects in the offhand. One of my favorites was SWoE, i found that this wepon, althgough with a much lower delay and less chances, would stil proc an average of one time a fight even in the offhand. Does anyone have similar results to this? Is it a slow procer?
1 post
Yeah Dathgunz, we pretty much get smoked damage wise by just about every melee out there, with ruffly the same level equipment. This is normall, and intended, as we are the most defensivly oriented class around.
The best way for you to increase your damage at lvl 51 is to gain levels. New damage tables, and the increased attack from greater weapon/offense skill will bring your damage up considerably. Other then that you could look to maxing your str, better haste item, Atk increasing items like belt of great turtle or gobo earing. Thats pretty much it tho. Levels being your best bet.
Personally as long as I hold agro, I wouldn't care if I did 2 damage in a 15 minuet fight, it's not my job. Just level up and work on your ac/sta/hit points, cause your weapons will easly last you to level 60 and beyond.
Blazz the Troll Warlord
The best way for you to increase your damage at lvl 51 is to gain levels. New damage tables, and the increased attack from greater weapon/offense skill will bring your damage up considerably. Other then that you could look to maxing your str, better haste item, Atk increasing items like belt of great turtle or gobo earing. Thats pretty much it tho. Levels being your best bet.
Personally as long as I hold agro, I wouldn't care if I did 2 damage in a 15 minuet fight, it's not my job. Just level up and work on your ac/sta/hit points, cause your weapons will easly last you to level 60 and beyond.
Blazz the Troll Warlord
10 posts
I need the help of my fellow Warrior's. I am not interested in talking about the ability of a ranger to tank. Personally I play warriors so please all you would be tanks out dont flame or provide advice only real Warrior's. I am currently using a Fleshginder primary and a Frostbringer secondary. I have no problem holding taunt at all against all classes. ( well except the damn nukers that dont wait long enough lol). Ok to my question, I am interested in damage delt I hit anywhere from 35 to 60 in quads normally 3 sets of quads every 12 seconds mabe 4 . With occational crit for as much as 105. I do notice that my over all dmg is high but no where near most other classes is this normal or can I work in upgrade either equiptment or stat to gain more damage output?
hp unbuffed 2230
ac unbuffed 980
att unbuffed 950
str unbuffed 190
stm unbuffed 110
agli unbuffed 85
Dathgunz Champion 51'st season Prexus
Officer of The Legendary Dark Knights
hp unbuffed 2230
ac unbuffed 980
att unbuffed 950
str unbuffed 190
stm unbuffed 110
agli unbuffed 85
Dathgunz Champion 51'st season Prexus
Officer of The Legendary Dark Knights
7 posts
higher str and seeing how this weapon proc a nice 160dd getting your dex real high would help you out a great deal but for most part are damage output can't compare to nukers and such
As a warrior i would make the sta 160 and the str 110, instead of how you have it now. warriors need the hp more than damage
1 post
Opinions on warrior equipping 2 fleshgrinders (they are not lore)? If not, what would be an offhand weapon to consider?
2x FG much better than SBoZ
BUT patch just nerfed all CT items to REQUIRED lvl51
NOT recomended. REQUIRED
BUT patch just nerfed all CT items to REQUIRED lvl51
NOT recomended. REQUIRED
27 posts
What weapon is better for a warrior the Swiftblade of Zek or the Fleshgrinder? I sold my Fleshgrinder to buy a Swiftblade, but I am having second thoughts.
Scholar
46 posts
If you're looking for aggro, then go with the fleshgrinder. At the time of this post, PoP is a new release so we don't know what weapons will be upgrades there. For a list of the best aggro weapons, refer to the Steel Warrior message boards here:
http://pub14.ezboard.com/fthesteelwarriorthebunker.showMessage?topicID=2989.topic
Note that the Fleshgrinder isn't in that list, but it will have better taunt value than the SBoZ due to the proc.
Edited, Sat Oct 26 16:23:37 2002
http://pub14.ezboard.com/fthesteelwarriorthebunker.showMessage?topicID=2989.topic
Note that the Fleshgrinder isn't in that list, but it will have better taunt value than the SBoZ due to the proc.
Edited, Sat Oct 26 16:23:37 2002
4 posts
Swiftblade has better stat but no effect, i think this is better for someone who likes solo and who is a war and likes the taunting part of it.
Swiftrblade is cool enough for people like rangers who need the mana part as well! Self think hehe, depends class and main job you are in your guild etc.
Fleshgrinder good for taunting, Swiftblade is better stat. It all depends on what ya need!
Swiftrblade is cool enough for people like rangers who need the mana part as well! Self think hehe, depends class and main job you are in your guild etc.
Fleshgrinder good for taunting, Swiftblade is better stat. It all depends on what ya need!
#REDACTED,
Posted: Oct 09 2002 at 8:20 PM, Rating: Sub-Default, (Expand Post) SoD is the only thing in the game better then this as of the date I am posting this. For the simple reason of taunt factor. I've tried HoH and BoC and neither are as good.
44 posts
this is better for a warrior. Simple fact better ratio. as a warrior the str bonus on the SBoZ are really pointless, AC at level you get either of theese 10 isnt going make a noticeable differance, both give 75HPs, this has a proc. Oh did I mention this is hell of lot easier to get than a SBoZ too. For a ranger tough decision, I would lean more to SBoZ for the mana and the non proc to keep agro low, unless your using it soloing and XPing and small stuff like that. Any ranger will tell ya agro is a problem in the higher game and a lazy ranger over devolopes it and dies.
The Sboz has 100 Hp now.
#StrungOut,
Posted: Aug 26 2002 at 9:23 AM, Rating: Sub-Default, (Expand Post) Well Id have to say this is better than anything
4 posts
Not really, bloodfrenzy has 15% riposte and with AA skill double riposte and the 100percent 8second riposte discipline, it will taunt like a level onetrying to kill the god!
If you find yourself MA a lot, you might want a procing weapon like the Fleshgrinder. But the stats on the sboz are awesome. Idea would to have both :p
11 posts
no no no the best item for a warrior is http://www.allakhazam.com/db/item.html?item=6447 or http://www.allakhazam.com/db/item.html?item=13242 cause of the proc adds u 700 points on hate list uber for a warrior
Electriumm Energizer
50th Halfling Warrior on sullon zek
http://www.magelo.com/eq_view_profile.html?num=257525
Electriumm Energizer
50th Halfling Warrior on sullon zek
http://www.magelo.com/eq_view_profile.html?num=257525
Well...that depends on if you are the MA or not. If you are not MA, then Enraging Blow could mean a total wipe out for the raid. And there are better weapons than a Blade of Carnage available to a warrior that could get a Bloodfrenzy...
Free account required to post
You must log in or create an account to post messages.© 2024 Fanbyte LLC